OTSL、丸和電子化学、東京工業大学 NEDO助成事業にて工場DXの実証実験(自動搬送ロボット、AI外観検査)を推進中
株式会社OTSLは、丸和電子化学株式会社、国立大学法人東京工業大学と共同で、国立研究開発法人新エネルギー・産業技術総合開発機構(以下 NEDO)の助成事業である「5G等の活用による製造業のダイナミック・ケイパビリティ強化に向けた研究開発事業/工場DXにおける低遅延クラウド・エッジシステムの研究開発」(以下、本事業)を2021年9月からスタートし、2022年度までに基本的な仕様設計や試作を行いました。2023年度は機能検証や性能評価を中心に研究を進め、更に本助成事業期間終了後の2024年4月以降、研究成果を基に具体的な事業化を目指すための実証実験を進めていきます。
本事業では、クラウド側、エッジ側の高精度での時間同期、処理分散のために、5G等(ローカル5G、Wi-Fi 6E)の低遅延無線通信環境で遠隔分散リアルタイムOSの仕組みを構築し、このプラットフォーム上で遠隔からの製造ライン制御、クラウド連動による品質管理を可能とする低遅延制御クラウド・エッジシステムの研究開発を行います(図1)。その遠隔分散リアルタイムOSとその上のクラウドシステム及びエッジシステムを適用した製造ラインに於ける加工順の組み換えや個々の生産設備の動作の変更等、柔軟・迅速な組み換えや制御が可能な生産ラインの実現を目指し、生産設備等の遠隔での一括最適制御のために必要となる要素技術の開発を行い、工場内の制御をクラウド集約し、各工場内の設備投資コストの低減、製造ラインの故障診断/保守の効率化を目的とします。
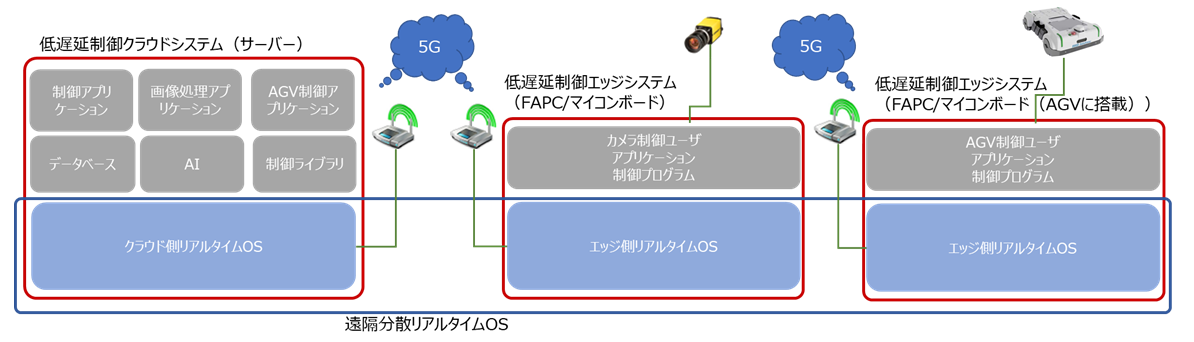
図1 低遅延クラウド・エッジシステムのイメージ
アプリケーションの事例として、以下の先行事例2件について実証実験を進めています。
1件目は、自動搬送ロボット(例:THK株式会社 SEED-MoverなどのAGV/AMR)の自動部品配送により、人による運搬の自動化(無人化)を実現、生産効率を向上させる実証実験です。少量多品種生産向け製造ラインのレイアウトフリーな製造現場で、人が必要な部品を集め、製造ラインに直接供給している現状から、クラウドとエッジ(自動搬送ロボット)間で無線制御が可能となり、自動搬送ロボットが生産に必要な部品を集めた牽引台車と自動で連結・切離し、クラウドで遠隔指示した周回ルートを反復走行させます。
今後は、牽引台車連結時の自己位置推定精度の改善、部品供給システムとの連携や複数台走行時の交差点制御、及び周回走行時の安定性・安全性に取り組み、製造ラインへの導入に向けた実証実験を実施します。
2件目は、クラウド上の画像処理AIによる検品の実証実験です。実証実験先(丸和電子化学)の生産部品の最終品質検査では、現状、検査担当者による目視検査と汎用の画像検査装置を組み合わせて行っていますが、担当者の熟練度の差による検査精度のバラツキや労働力不足による検査担当者の確保という課題がありました。本事業では製造ライン(エッジ側)で撮影した画像データをクラウド側に送信して画像処理及びAI外観検査をおこなうことで、製造ラインには製造物に適した照明・カメラと簡易的な制御ソフトのみの検査装置の設置で済むため、検査装置の簡易化、検査担当者常時配置が不要となることへの経費削減や検査精度の均一化を図ることができます。
今後は、特に複雑な3次元形状でかつ表面に光沢性のある製造物に適応した照明・カメラの配置を含めた画像検査システムの構築、及び不良品の発生頻度が少なく不良箇所も均一でない製造物に対して、少量の良品画像データのみで学習できるAIモデル手法の性能改善等に取り組んでいきます。
なお、この成果は、NEDOの助成事業の結果得られたものです。
■各社の説明と代表者コメント
《株式会社OTSL》
OTSLは、クラウド・エッジシステムの開発ベンダーとして本事業の中核技術である遠隔分散リアルタイムOSの仕組みを構築し、その上で、先行事例としての遠隔からの自動搬送ロボットの制御、クラウド連動による品質管理を可能とする低遅延クラウド・エッジシステムの研究開発を行います。
◎事業部長 中村 和夫のコメント
エコシステムを構築して工場の製造ラインシステムへの販売、及び協業企業経由でソフトウェアのライセンス販売を目指します。
《丸和電子化学株式会社》
丸和電子化学は、ユーザー企業として実際の製造現場に5G等低遅延な無線通信環境を構築し、無線通信を利用した事例評価を行います。
◎工務部長 松本 博行のコメント
工場内の運搬や検査、確認等の低付加価値作業の自動化推進により、生産性の向上を図ります。
《国立大学法人東京工業大学》
東京工業大学は、製造された製品の検品のための画像処理アルゴリズム、特に、学習データが非常に少なくても学習が可能となる特徴のある深層学習AIの研究開発を行います。
◎熊澤先生のコメント
工場の自動化に向けて製品検査の自動化は最も重要な課題である。本課題では複雑な3次元形状でかつ表面に光沢性がある事例について、最新のAI技術を駆使して計測センシング技術も独自に開発して、検査工程の自動化を達成しようとするものであり、その成果は産業界に大きく貢献するものである。
■本リリースに関するお問い合わせ先
株式会社OTSL
営業部 萩原 邦雄
Tel:052-961-1010
メールアドレス:info@otsl.jp
URL:https://www.otsl.jp/
丸和電子化学株式会社
工務部 松本 博行
Tel:0565-80-6654
メールアドレス:h-matsumoto@kojima-tns.com
URL:https://www.kojima-tns.co.jp/maruwa-site/
東京工業大学 科学技術創成研究院 未来産業技術研究所
熊澤 逸夫
Tel:045-924-5291
メールアドレス:kumazawa.i.aa@m.titech.ac.jp